
Robot Arm 2016
Written 10-7-19
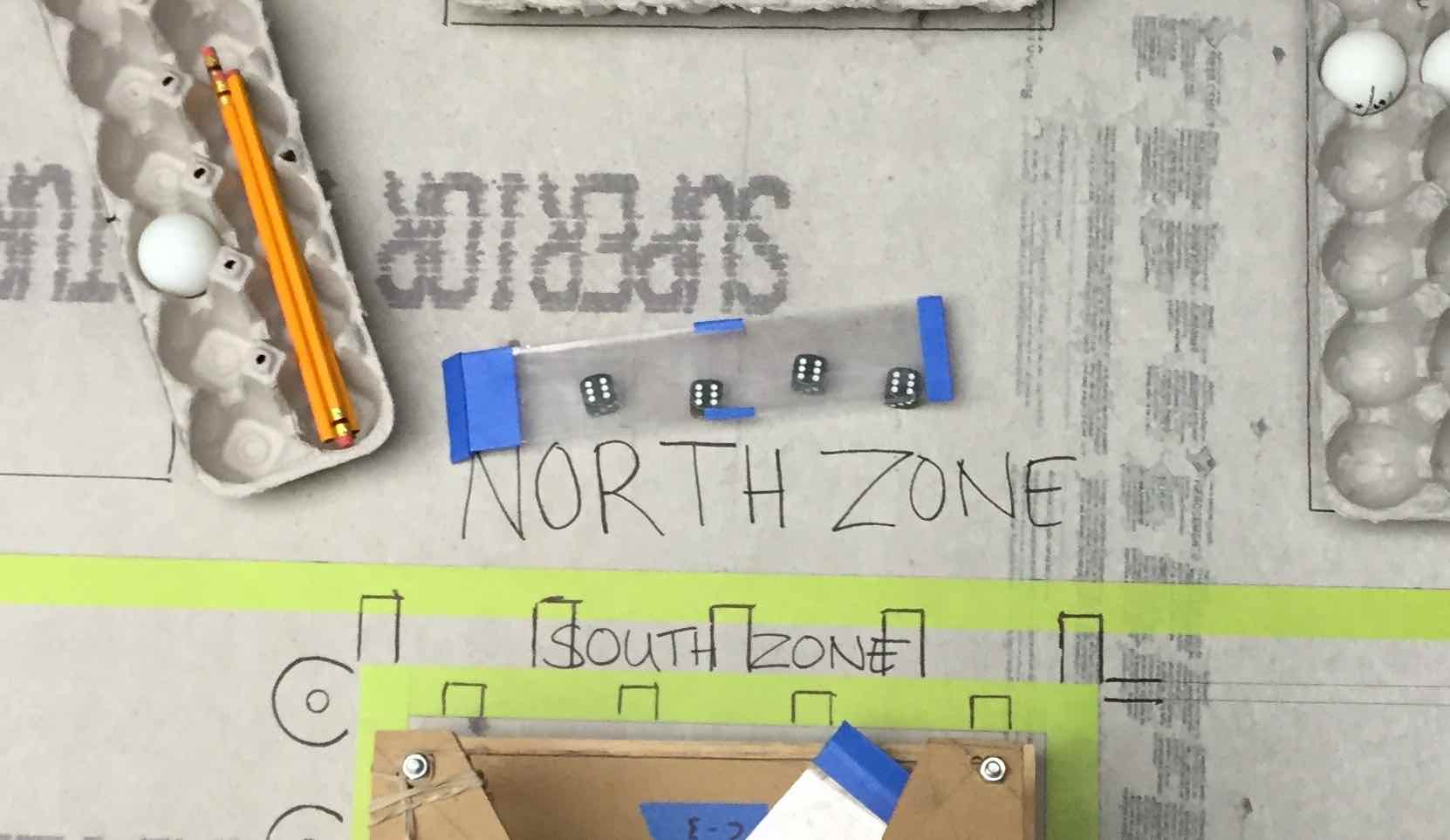
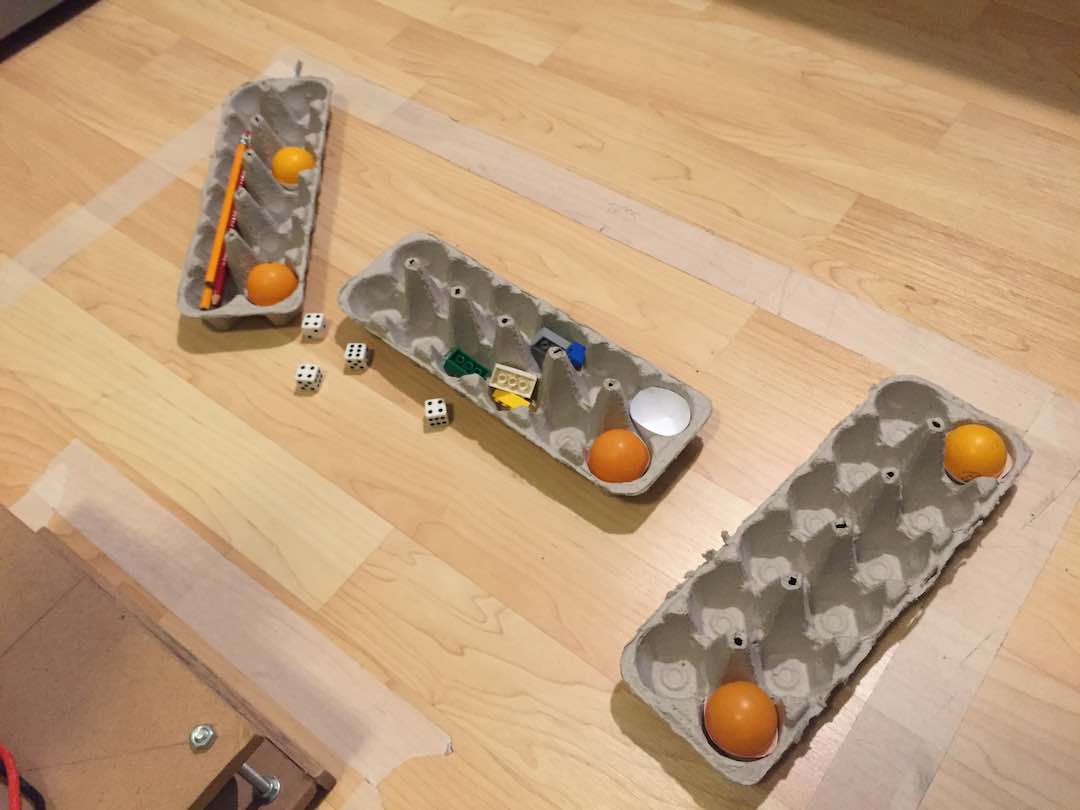
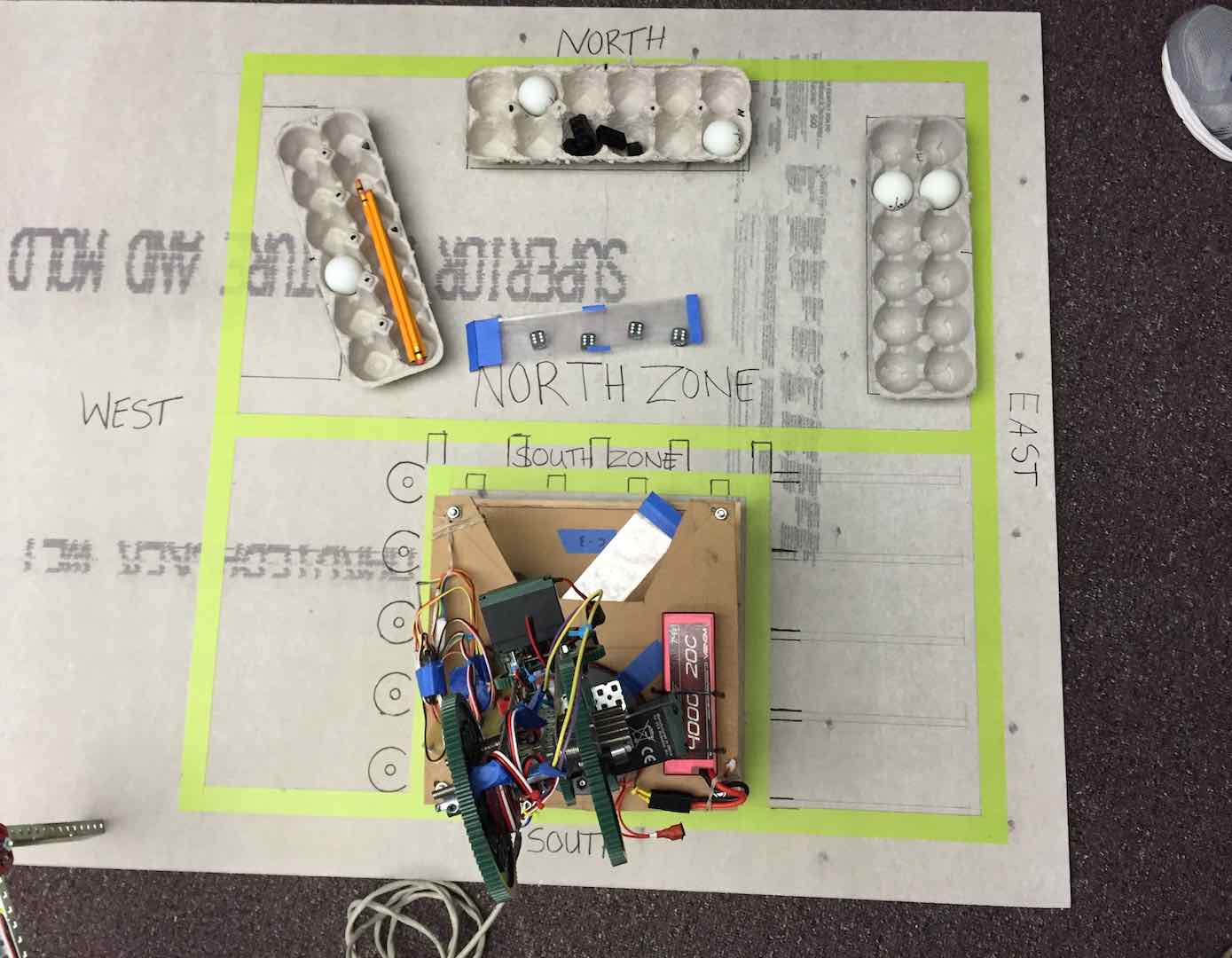
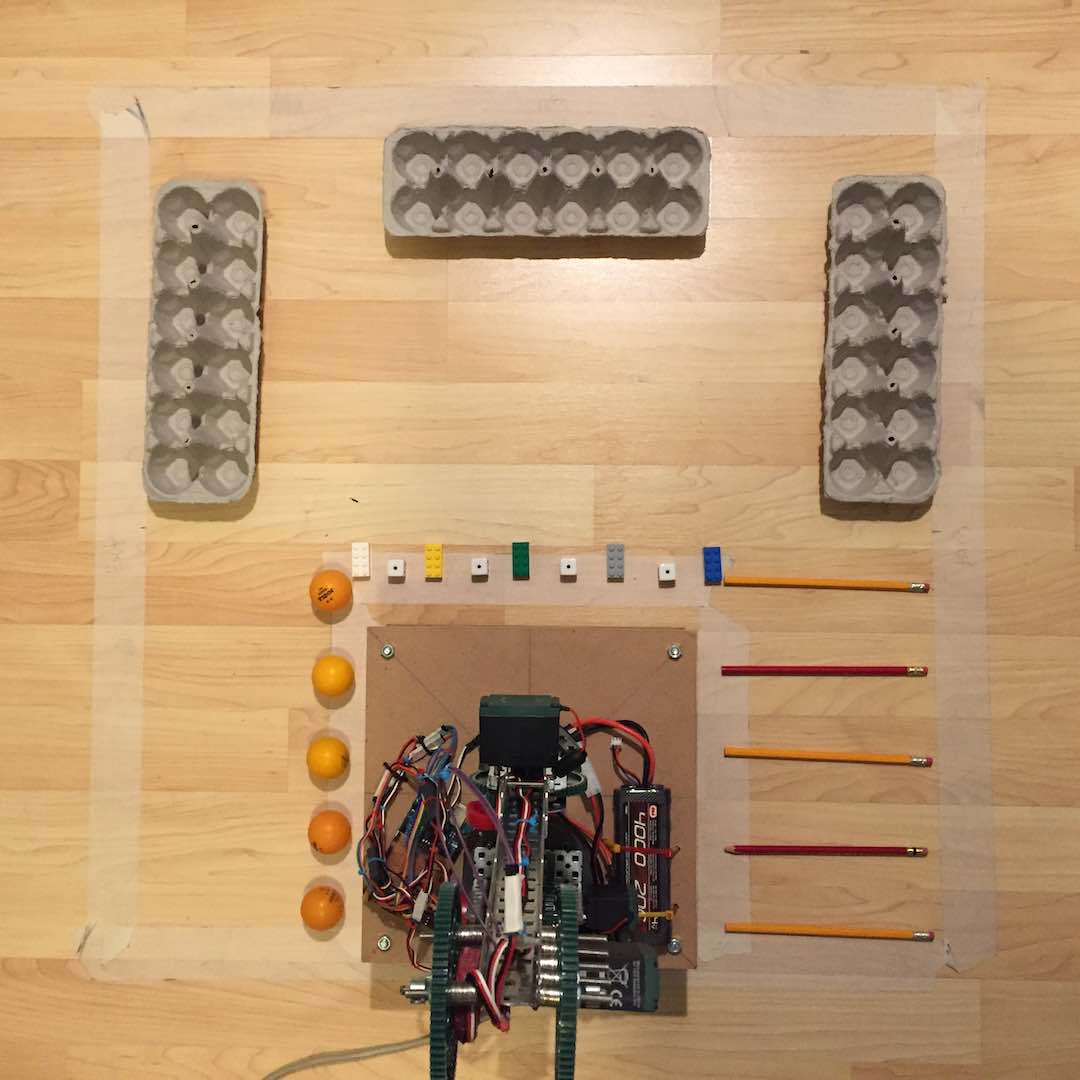
Coming into the SciOly 2016 season, I was pleasantly surprised that Robot Arm had come in from rotation. Along with Electric Vehicle, it provided the perfect opportunity to test out my engineering skills and get into the Troy SciOly team. The task was relatively straightforward. There were ping-pong balls, pencils, and Lego bricks that had to be picked up and moved into certain egg cartons. There were also dice that had to be flipped onto an even side facing up. With the rules analyzed and basic strategy planned out, I got to work.
Design
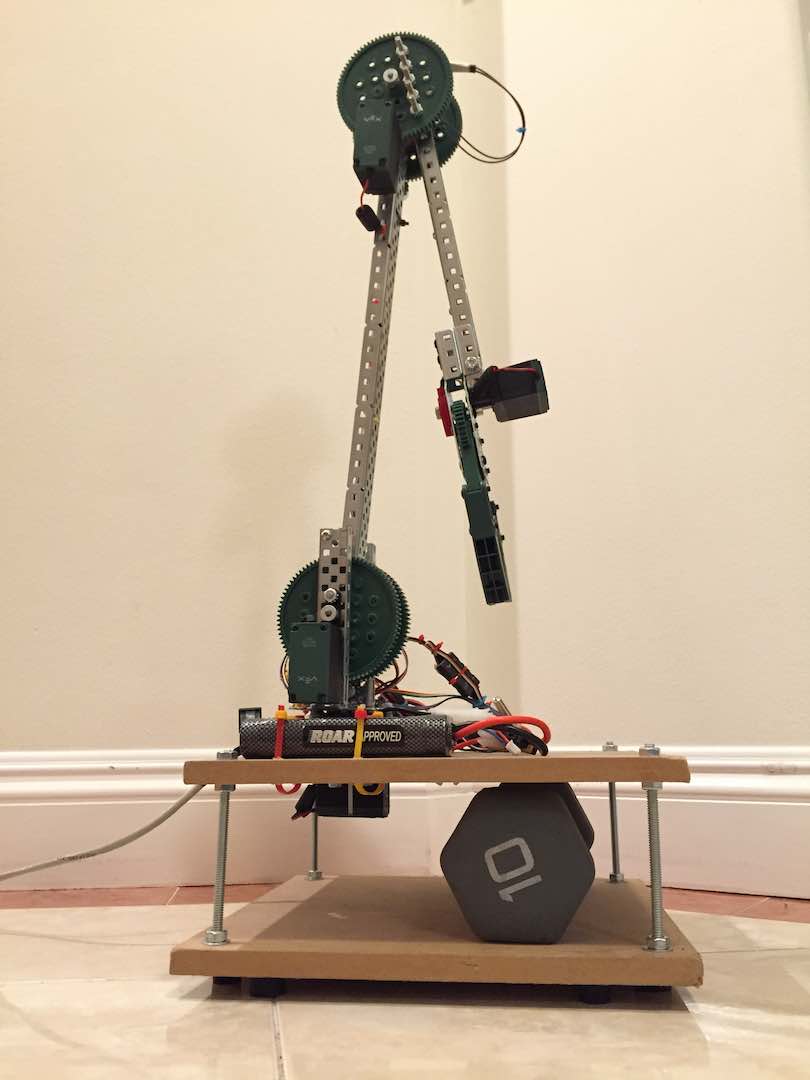
Since I didn’t have much experience in building robot arms, I decided to buy a bunch of Vex parts and go from there. As for the design of the arm, there really isn’t anything special about it. Most of it was based off of what I did in Robo-Cross except with different gear ratios. All the limbs were just extended to reach all corners of the work area. The base I used to mount the arm on was made of some MDF with test tube stoppers glued at the bottom for friction.
Dice
The interesting part of the design was my strategy for doing the dice. Initially, I tried using the arm to push down on one side of the dice to flip it to an even side up. Later on I realized that just throwing the dice until an even side showed up worked better. However, while getting an even side up maximized points, getting the six side facing up was the tiebreaker. Since the task was so simple, it became necessary to figure out how to consistently get all the dice six side facing up.
Later on in the school year, I noted that all of the dice were by default ones side facing up. On any standard dice, this meant that the six side was facing down. Thus, to get all the dice six side facing up I just needed to flip them all. Keeping in mind the limitations of what my arm could manipulate, I came up with the idea of using a clear sheet of plastic with tape laid over it sticky side out. At first I tried placing the sheet over all the dice, but that had consistency issues. The strategy that worked just about every time was placing the sheet down, placing the dice on top of it, and then flipping the whole thing over to get all sixes.
Electrical
One of the things I really liked about Troy SciOly was just how much autonomy I had. That made sense considering all the engineering events were self-funded and we didn’t have a workshop. At Muscatel, one of the things I never got to do was implement a slave arm controller. Compared to most other alternatives, it’s easily the simplest and most intuitive controller design. I started out by mounting some potentiometers on each of the joints. Some of the joints, like the turret, took some ingenuity to mount securely. Next, I built a controller that was proportionally the same as the main arm and attached some potentiometers to that.
Since I needed to read from about 8 different potentiometers, I decided to use an Arduino Mega because the Arduino Uno only has 6 analog inputs. I attached some connectors to perfboard to make a shield and plugged everything into it. The code was really simple since I only implemented proportional control (I didn’t know about PID yet). Wire management was also pretty straightforward and clean. Later on, I even made my own PCB for the shield by drawing it on using Sharpie and etching.
One problem that showed up during the year was that the claw motor would randomly stop working. This usually happened if I gripped an item too hard. After some research, I learned that Vex motors have a PTC fuse inside that cut power if current draw was too high or it got too hot. While a nice safety feature, I couldn’t have a motor that can randomly shut off during competition. I removed the PTC from every Vex motor I had. I then added a power resistor inline with the claw motor for safety. Problem solved.
Competition
Tryouts
Before even considering competing at Nationals, I had to first compete at Troy SciOly team tryouts. Right after I finished the arm, I pretty much practiced whenever I could. After about 10 tries, I was able to get a max score. Then I just kept working to be faster and more consistent.
Eventually tryouts came along. With regards to Troy SciOly, I was just that kid who went to Muscatel. I didn’t have a reputation yet. I stood there at tryouts looking at all the other robot arms people built. It was safe to say I was a bit intimidated. I still remember everyone asking me, “Are you going to beat Jared?” He was more or less the engineer guy at SciOly at the time. Not wanting to be even more nervous after watching everyone, I went first. My heart was beating out of my chest during that entire 3 minute run. At the end of it, I had a max score. While everyone else went, I was still nervous because I didn’t consider what I did to be that impressive. After everyone went, I realized I had won. I was in the team.
Nationals
Throughout the year, my robot arm performed admirably. I even got 1st at the State competition. However, due to how well the arm performed and how much work my Electric Vehicle needed, I made virtually no functional changes to the arm since October. I did keep on practicing and practicing until I consistently got max scores with the dice tiebreaker in about 2min 15s. At the national competition, I got yet another perfect run. However, like I said before the task was very simple so I ended up only getting 5th. Considering my arm only cost $400 and I built it back in October, I was pretty satisfied.
Here’s a couple pictures of the robot arm. Since we had to document everything, I actually have pictures of it.
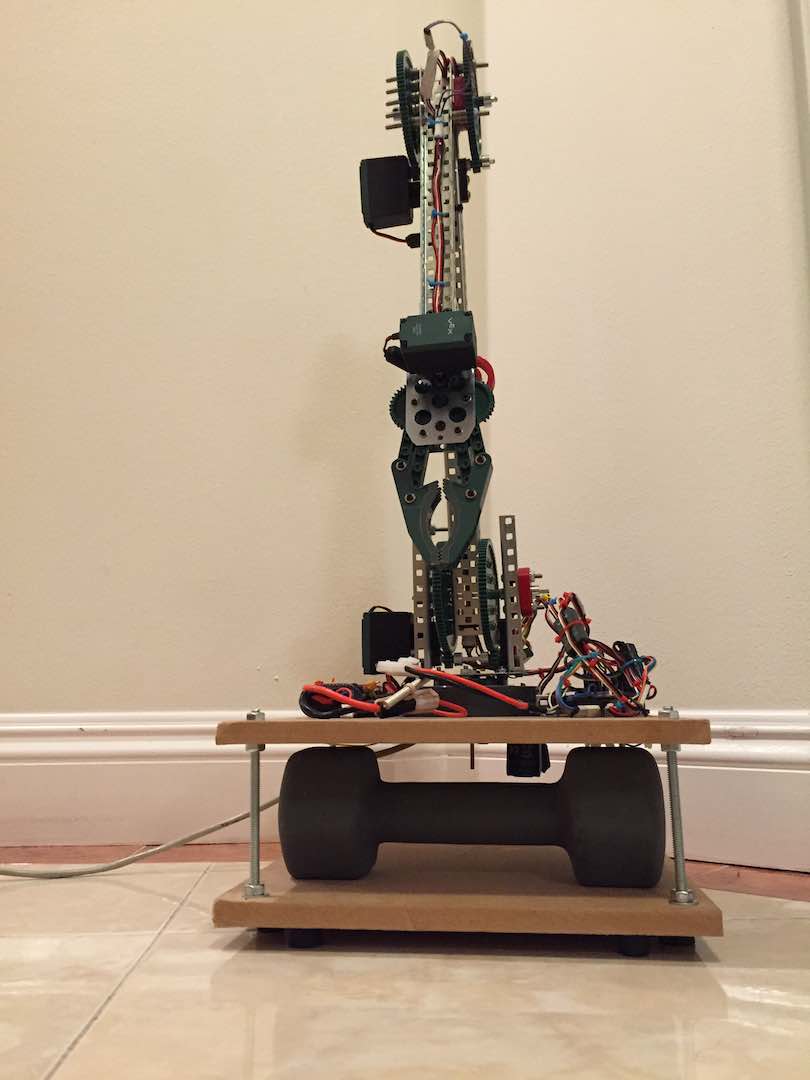
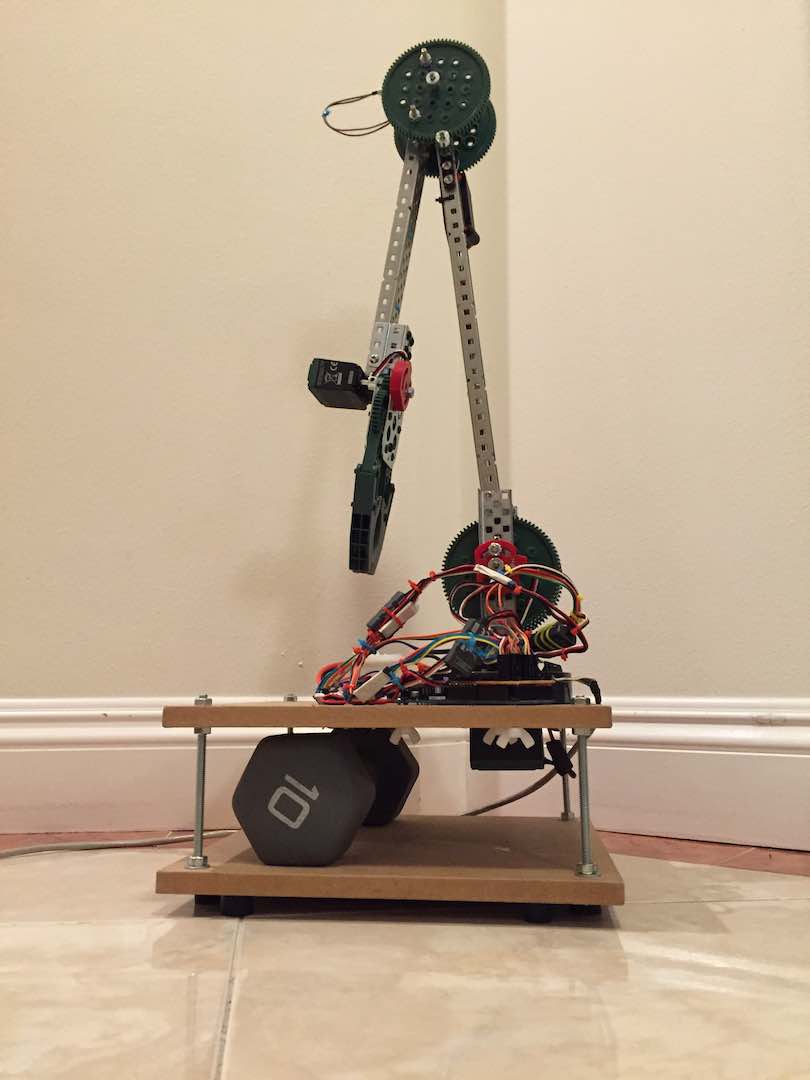
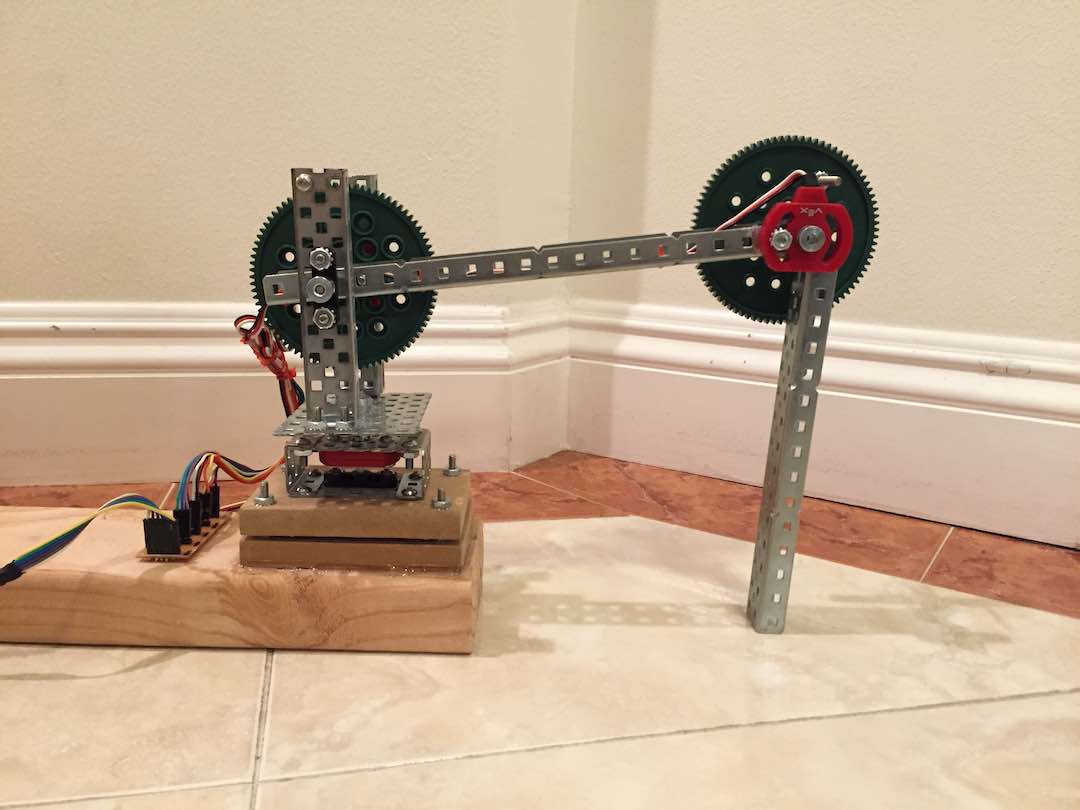
I don’t have a video of my run at Nationals, but I do have one from States. I messed up a bit.

Comments