
Electric Vehicle 2017
Written 9-27-19
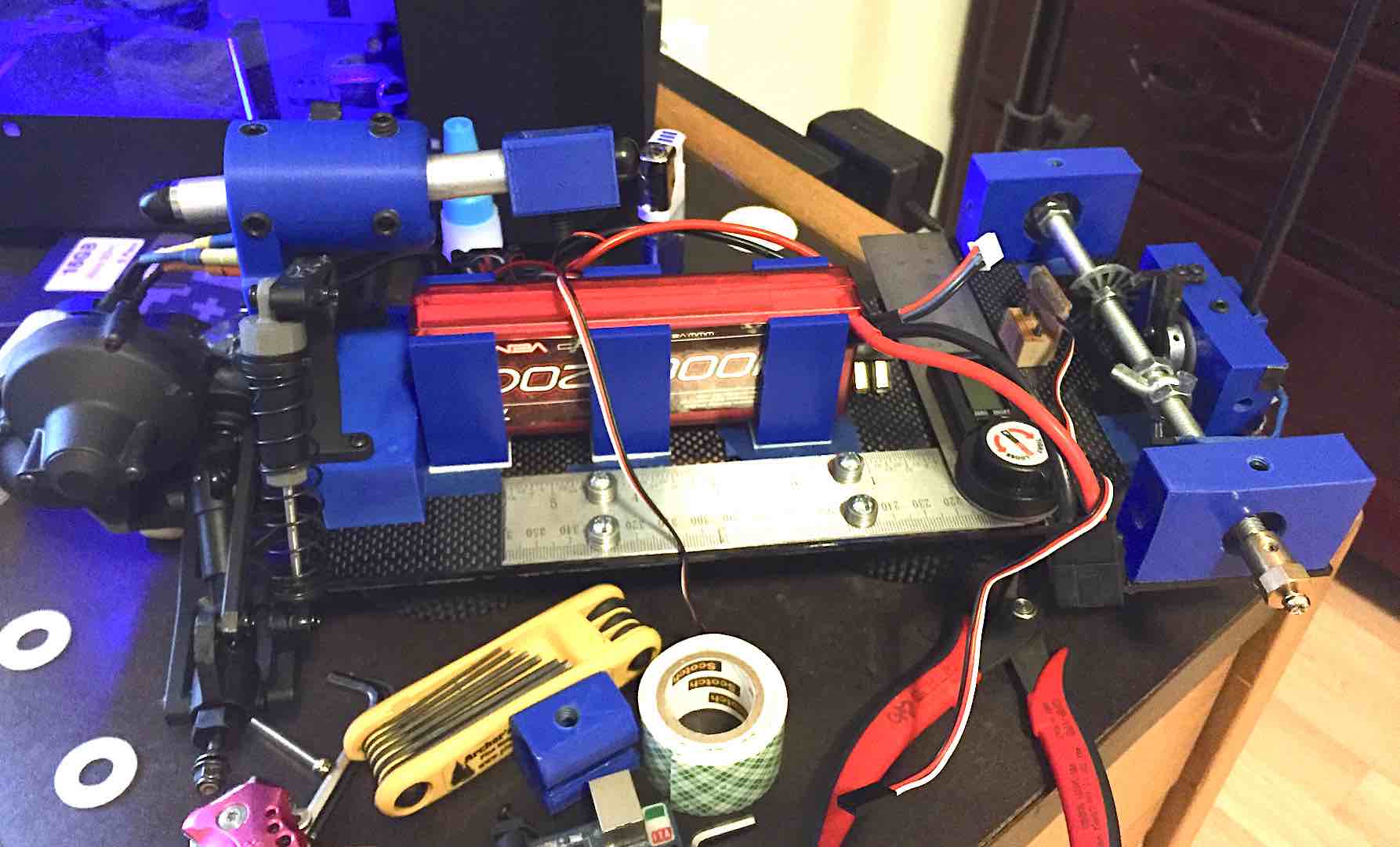
Coming into the SciOly 2017 season, the biggest change made to Electric Vehicle was that the car now had to travel on a curved path through some cans. Based on some rough calculations, I decided to use last year’s vehicle. I proceeded to make various modifications to bring it in line with accomplishing this year’s goals, starting with lots of 3D printed parts.
Keeping in line with my desire to make the user experience with the vehicle as simple as possible, I kept the laser sighting system. To aim it, I would just aim to the right of the cans to account for the curvature of the path. After a lot of test trials, I was able to get the vehicle relatively accurate.
At tryouts, the vehicle failed spectacularly. The one thing I failed to account for was the quality of the surface. The floors in our science building were notoriously dirty, which drastically reduced the coefficient of friction. This led to the steering not working at all and the vehicle headed straight into a wall. For reference, I had calibrated my vehicle for a clean hardwood gym floor like what we usually see at competition. This is a prime example of when optimizing for competition instead of just getting past tryouts really didn’t work.
Later in the year I had this idea of building a drone that could identify and fly through the cans and to the target point. Sadly, no one seems to answer the rule clarifications I submit, so the idea never came to fruition. Anyways, I had more than enough things to worry about that year.




Comments