
AUVs 2019 Power Distribution Board
Written 8-23-19
One of things we needed for our sub was a power distribution board. It would serve as the central hub for any and all things power. Working off of our power consumption spreadsheet, Mark and I developed specifications for the board including size and current capacity. We also specified what voltages needed to be supplied and how many components were to be connected to those power rails. With all the requirements listed, I headed straight to KiCad. This was my first time designing a power distribution board, so I learned quite a bit about copper plane placement and trace current capacity. I based the design off of a FIRST robotics board I found online.
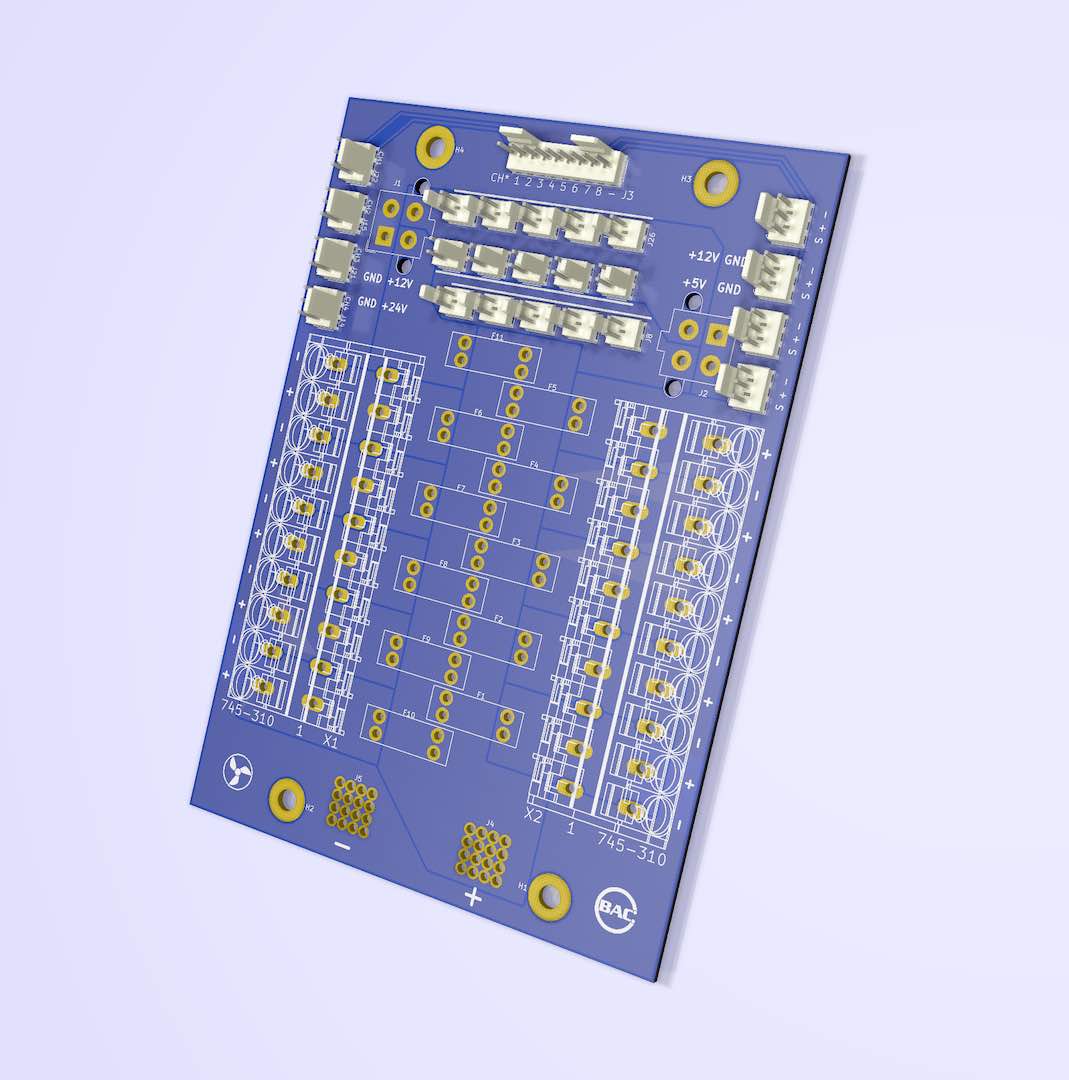
We were really grateful that Bay Area Circuits sponsored the manufacture of our board. Our main concern was current capacity and they helped out wonderfully with helping us make sure our board could handle everything. After sourcing the parts, we got started assembling the board.
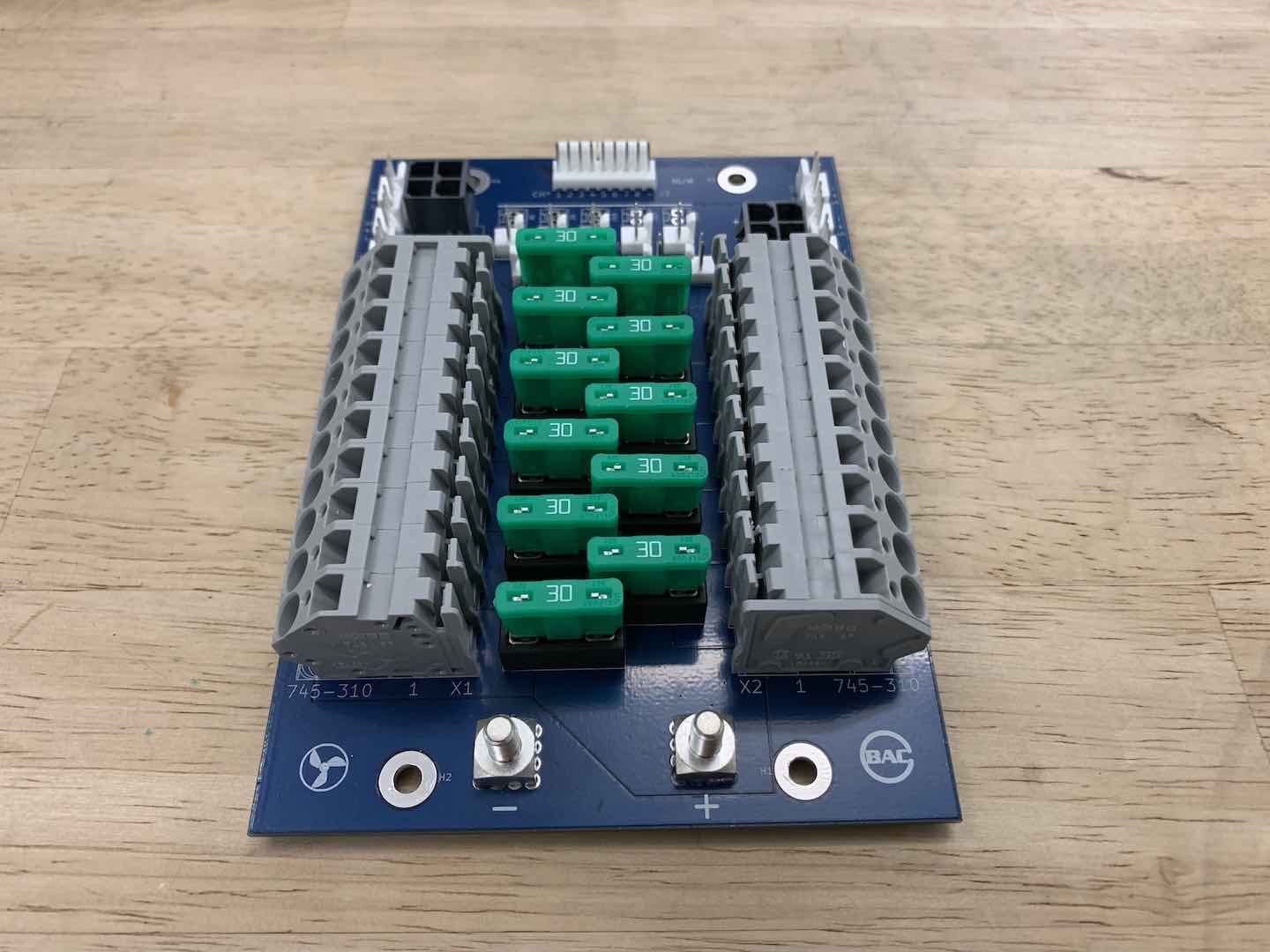
After the RoboSub competition in early August, we definitely had a lot of things we wanted to change, including the power distribution board. It performed admirably, but we now need to specify newer requirements. Time for next year!




Comments