
Micromouse DeCal
Written 8-23-19
I had quite a bit of fun in this decal. Our goal was to make a robot that would go through a maze and map it out. Then it would go through again as fast as possible. Fastest robot wins.
Working in groups of three, we put together a predesigned robot and proceeded through several labs from motor control to wall following. It was pretty cool working on the control systems for the motors. We used these really awesome time of flight sensors to do wall detection. Honestly, with my experience in Arduino most of the code was pretty trivial, but I still did learn a thing or two. Unfortunately, there wasn’t enough time to implement the maze solving, but we did get to wall following and turn detection.
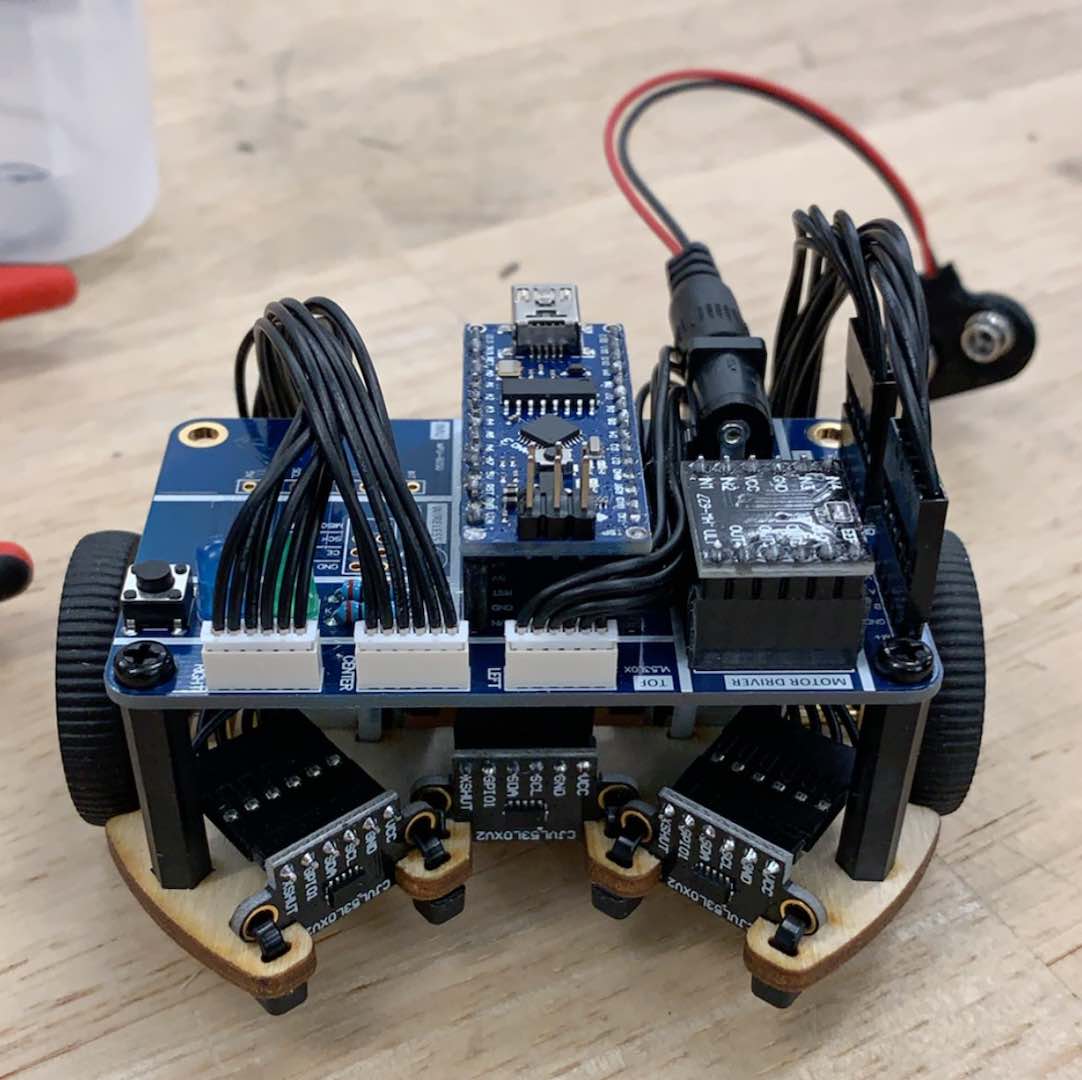
There are quite a few things I would change with the robot’s design, but overall it proved a great learning platform.




Comments