OSRO (Open-Source Reflow Oven)

An easy to deploy hardware and software solution for converting any oven into a Wi-Fi enabled reflow oven. This is just one.

An easy to deploy hardware and software solution for converting any oven into a Wi-Fi enabled reflow oven. This is just one.
With much more experience under my belt, I challenged myself both in size and processing power in the next version of my lightsaber.
First time trying solar power, PIC, and FRAM.
Recreating patented technology yet again but this time using OSH Park for the PCBs.
First try at a BLE project with the Pi Pico W since SDK support was recently added.
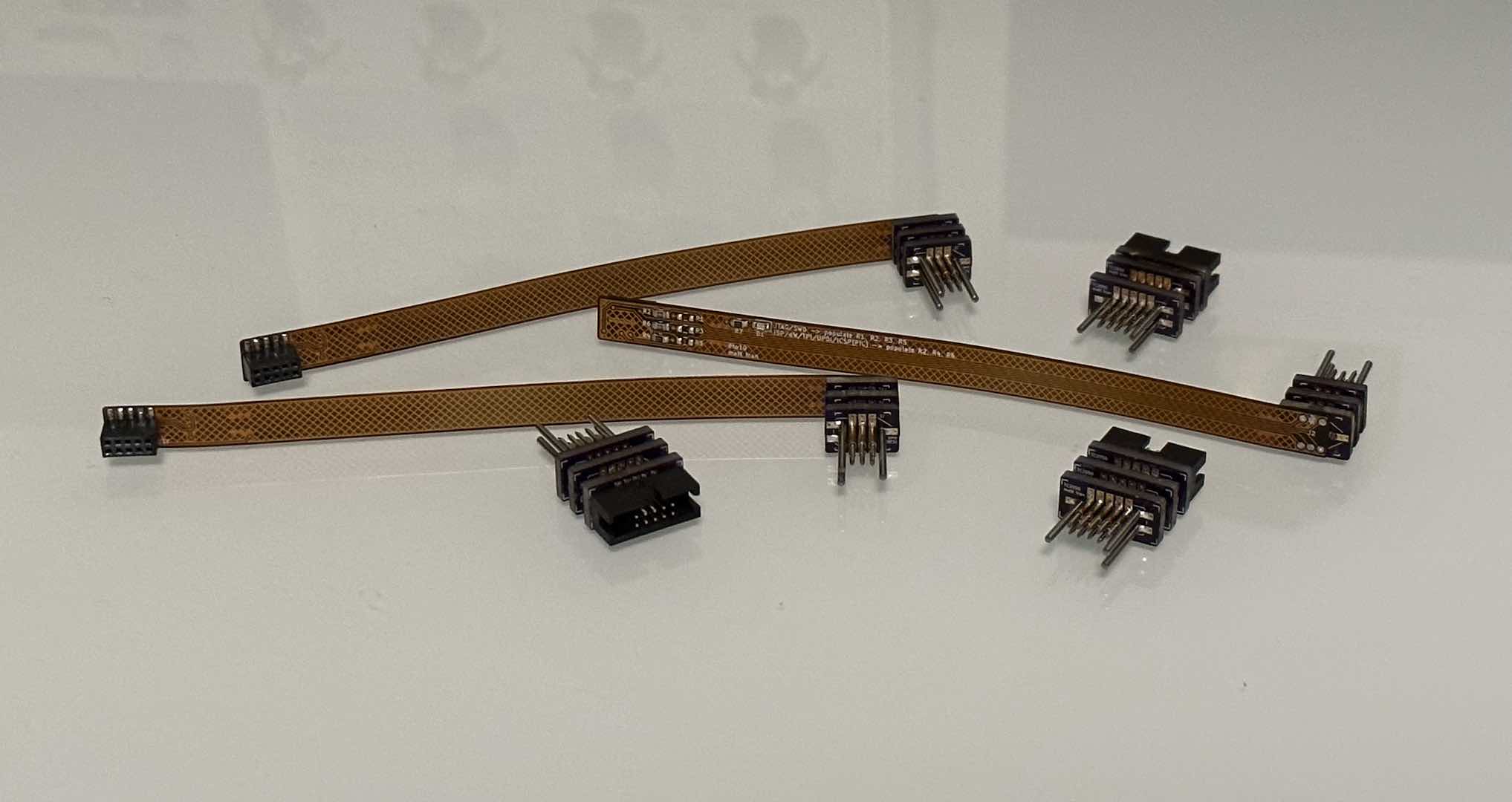
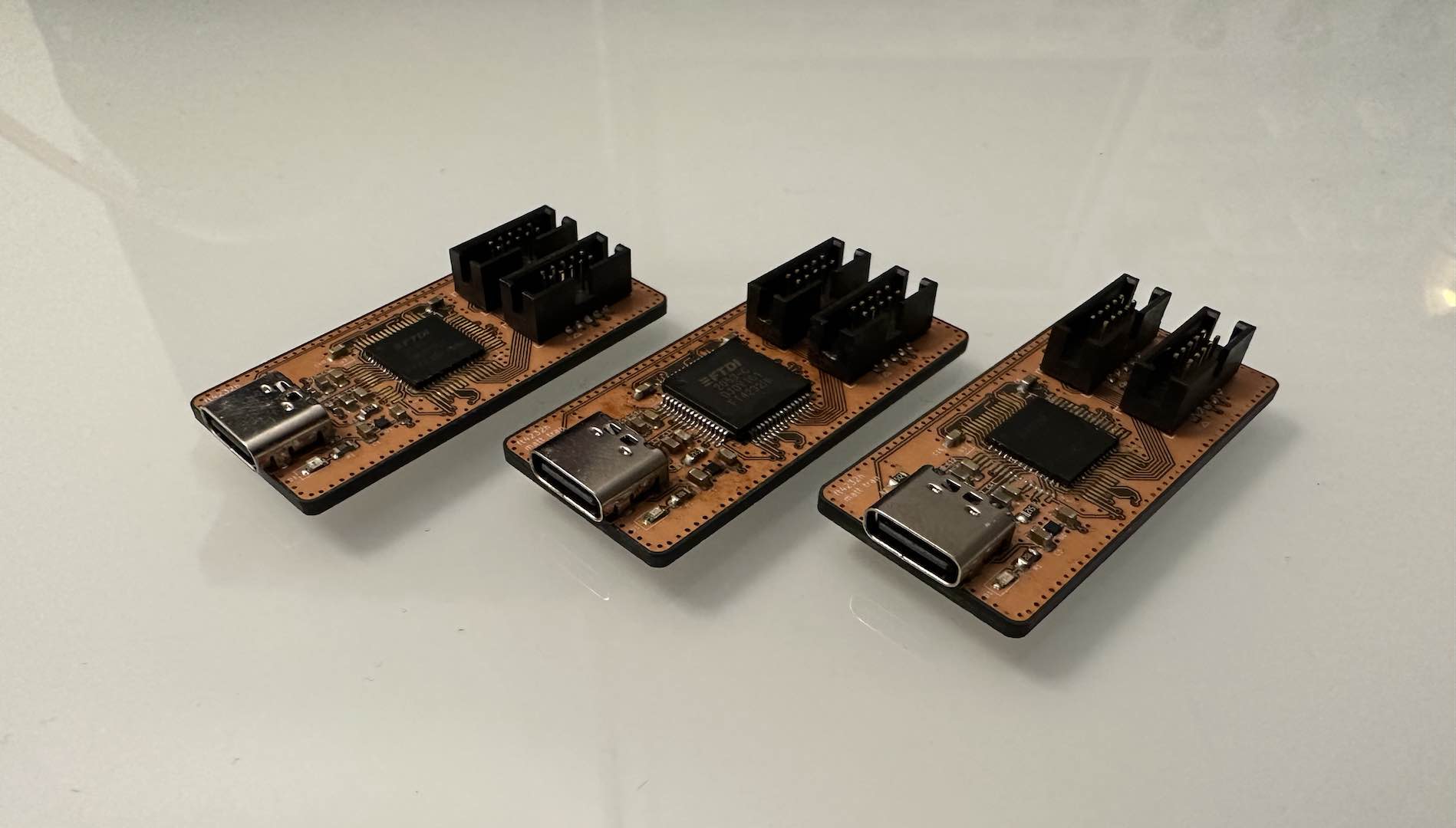
A breakout for the FT4232H so I can do JTAG/SWD.
A compiled list of the cheatsheets I made while at Berkeley.
After several years on WordPress, I realized my use case would be better suited for a static generator like Jekyll. To better maintainability and security!
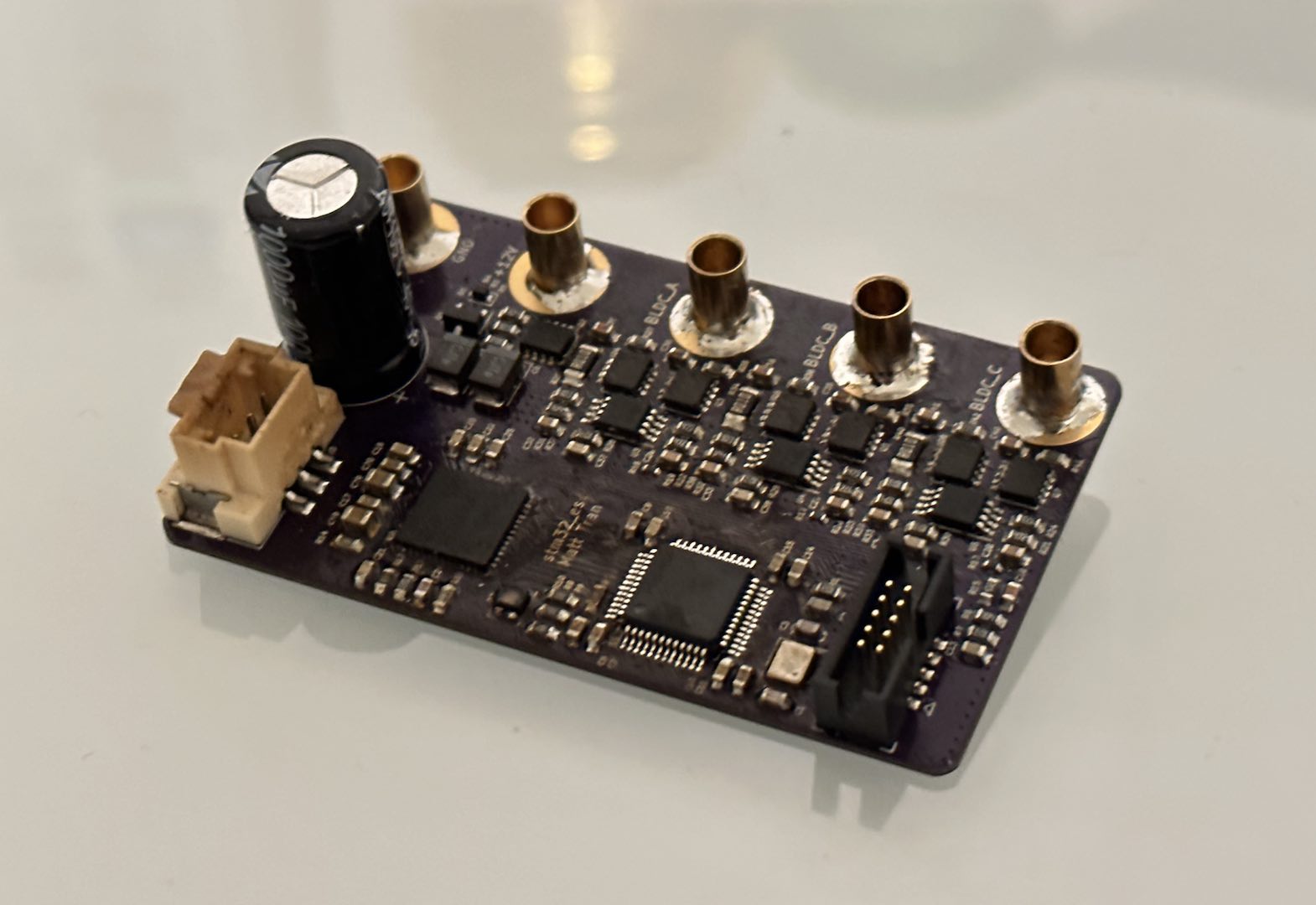
Wanting to demystify how commodity ESCs work, I built a trapezoidal sensorless BLDC driver. It doesn’‘t have FOC (yet) but it does have LIN.
Transmits button, microphone, accelerometer, and magnetometer data when awake and sips 2.5uA while asleep.
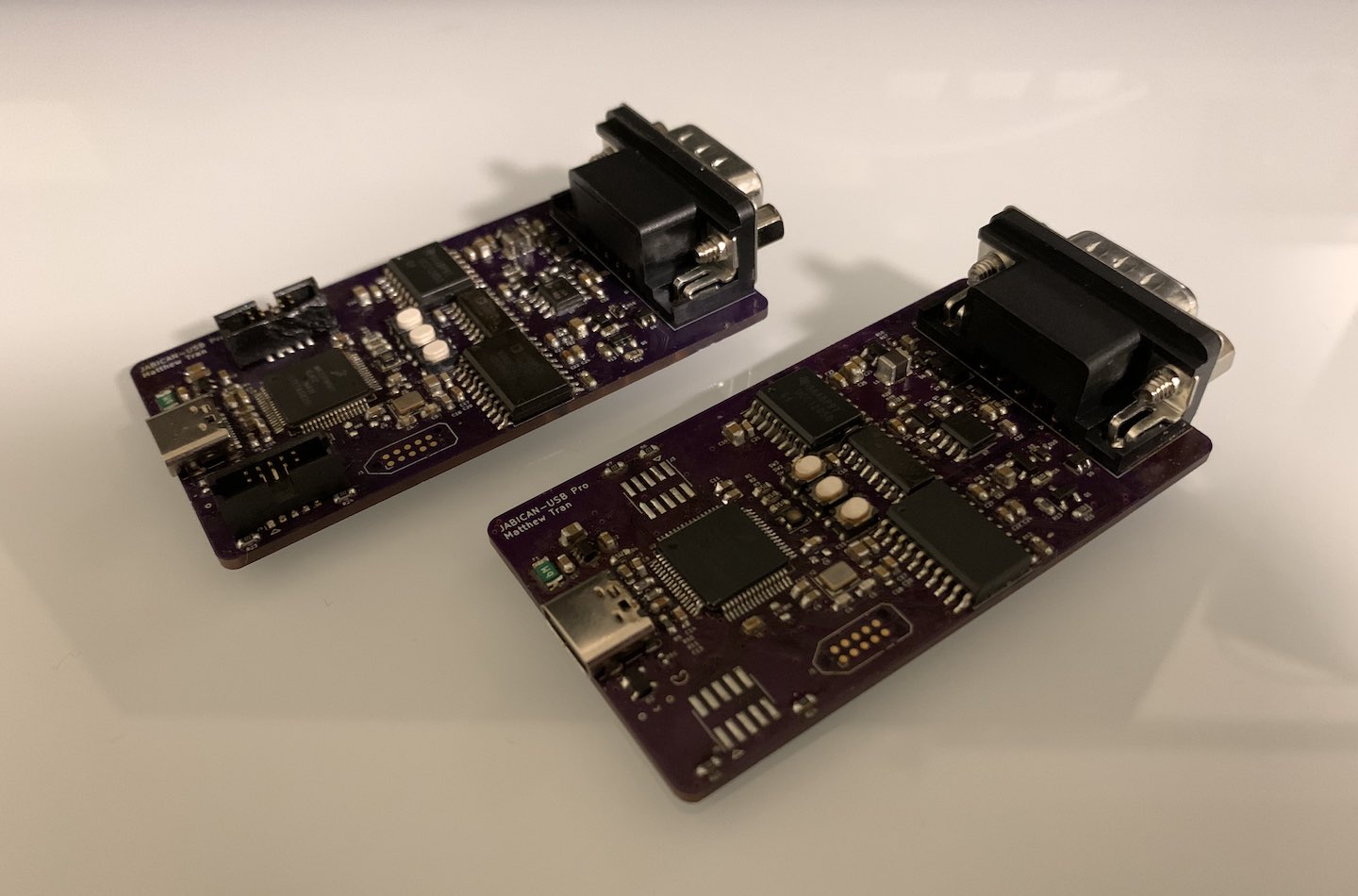
Designed as an open-source alternative to the PCAN-USB Pro, JABICAN-USB Pro runs JABI to provide isolated CAN and LIN access over USB.
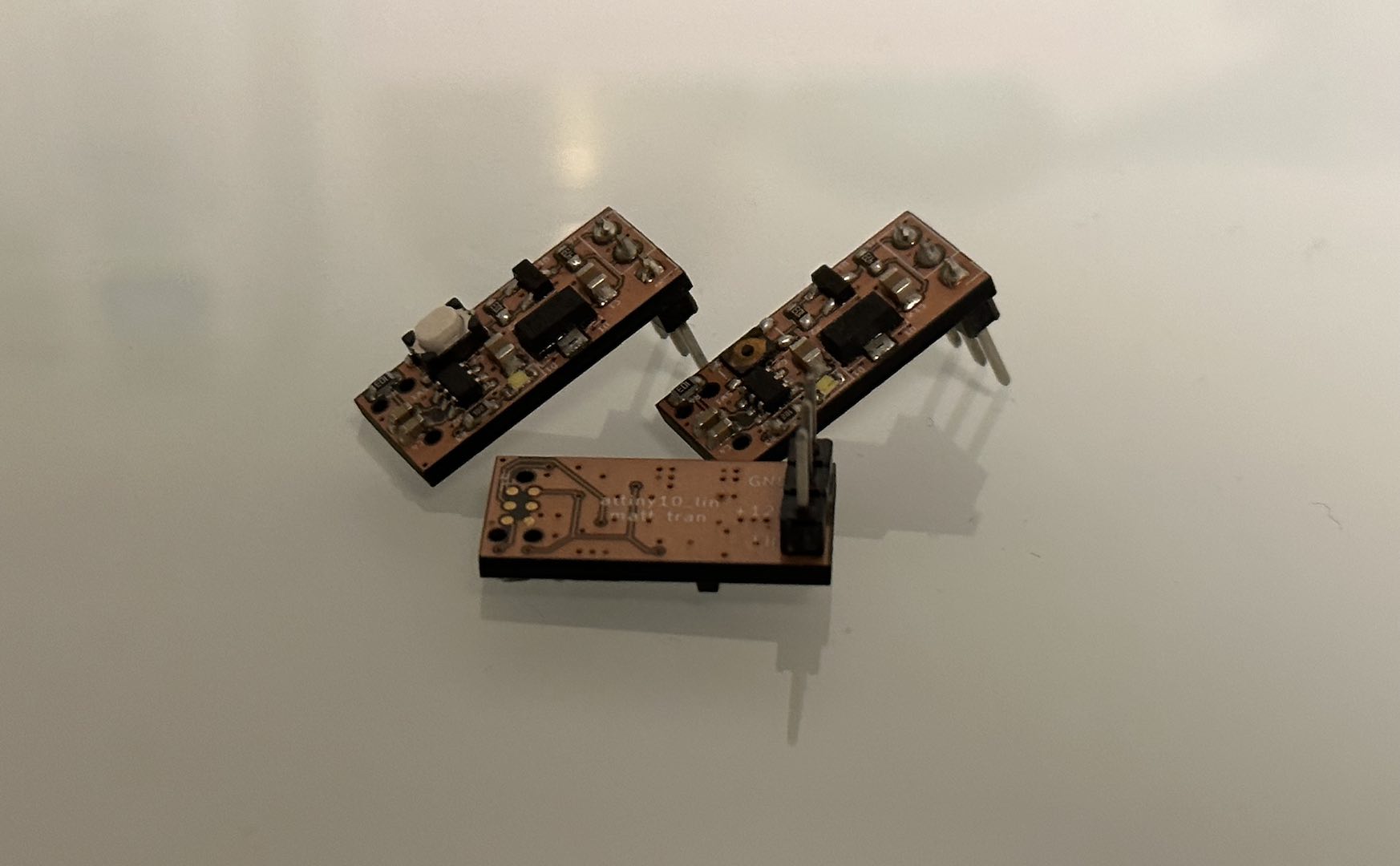
Since LIN transceivers are glorified level translators and LIN is slow enough to bit-bang, I built a LIN node using an ATtiny10.